![]()
Ejemplo 1.- Steepest - Descent.
Vamos a utilizar el algoritmo Steepest-Descent para encontrar el vector óptimo de un predictor de dos coeficientes . Supongamos que x(n) es ruido blanco de varianza unidad. Por tanto, la matriz de autocorrelación es
![]()
y el vector de correlación cruzada
![]()
Con estos valores de R y p, el vector óptimo está definido por h = 0, lógico puesto que la predicción igual a cero es la mejor para ruido blanco de media cero.
El mínimo error cuadrático medio es la potencia de la señal, que es la unidad. Se puede ver a través de la fórmula
x
(n) = sd2 - hH(n) p - pH h(n) + hH(n) R h(n)con sd2 = rd(0).
La ecuación de actualización de los pesos queda
h(n+1) = [I- mI] h(n) = (1 - m) h(n)
Comenzamos el algoritmo a partir de un valor inicial conocido del vector de pesos
![]()
Los coeficientes deben satisfacer las ecuaciones
h1(n) = (1 - m)nh1(0)
h2(n) = (1 - m)nh2(0)
Los pesos del filtro tienden a su valor óptimo, cero, independientemente del valor inicial, a una velocidad determinada por el parámetro m. Supongamos unos valores iniciales de
h1(0) = 1
h2(0) = 1/2
y casos distintos, con m = 0.01 y 0.05. Simulamos una longitud de 400 muestras y representamos el valor de los pesos en cada instante (en rojo, h1(n), con valor inicial 1, y en azul, h2(n), con valor inicial 1/2). Observamos que el valor mayor m lleva a la solución óptima más rápidamente.
m
= 0.01: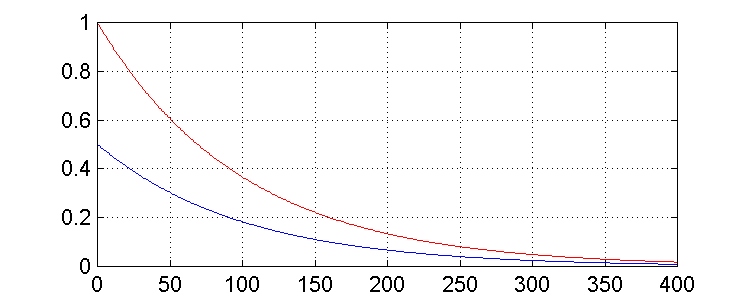
m
= 0.05:
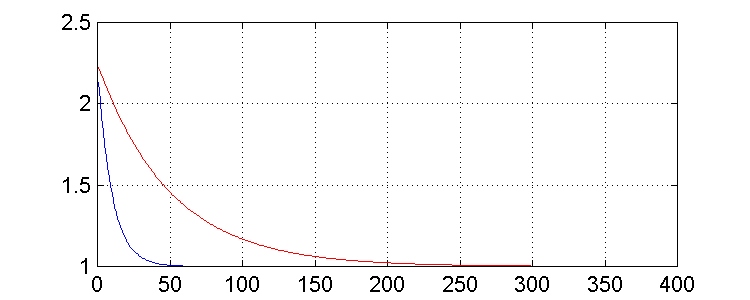
La expresión del error cuadrático medio es la siguiente:
x
(n) = 1 + (1 - m)2nh12(0) + (1 - m)2nh22(0)La curva en rojo representa el error cuadrático medio para m = 0.01. Como esperábamos, tiene una caída más lenta hacia el valor nulo que la obtenida con m = 0.05 (curva azul).
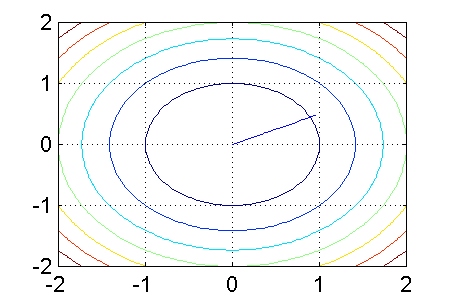
Podemos obtener una importante visión de la evolución del error si lo representamos frente a los coeficientes h1(n) y h2(n). De esta forma, es posible observar los contornos de igual error y la evolución de los coeficientes hacia sus valores óptimos. En la siguiente gráfica, el eje de ordenadas representa valores de h2(n) y el eje de abscisas, valores de h1(n). El punto de partida es h1(n) = 1 y h2(n) = 1/2. Ambos coeficientes evolucionan hasta llegar al óptimo h1(n) = 0 y h2(n) = 0.
![]()